-
![Xsens动作捕捉系统推进更安全、流畅的人机协作任务流程]()
-
![国产人形机器人突破!教会人形机器人如何像人类一样移动]()
国产人形机器人突破!教会人形机器人如何像人类一样移动
与远在大洋彼岸的特斯拉机器人使用相同的训练设备,Humanoid Robot(上海)有限公司正在使用Xsens动作捕捉系统和ai训练人形机器人模仿人类运动,执行复杂任务。
了解更多07-03 / 2025
-
![Shadow灵巧手在遥操作领域的应用与未来发展方向]()
Shadow灵巧手在遥操作领域的应用与未来发展方向
在自动化、人工智能和人机交互的推动下,机器人和遥操作领域正在快速发展,随着各行业越来越多的使用遥操作机器人系统来提供更高的任务完成精度、安全性和远程可访问性任务,了解该技术的当前状态、发展轨迹、及其面临的挑战变得更加重要。本文将主要介绍Shadow灵巧手在机器人遥操作领域目前的应用状态以及未来应用方向。
了解更多06-30 / 2025
-
![通过交互设计拟人软手框架与数据手套融合实现遥操作]()
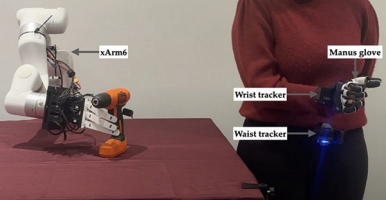
通过交互设计拟人软手框架与数据手套融合实现遥操作
卡内基梅隆大学机器人研究所正在研究一项全新的机器人遥操作项目——通过交互设计拟人软手框架与数据手套融合实现遥操作。该项目中机器人研究所使用了Manus Metagloves数据手套作为其数据采集装置通过数据流传输的形式最终实现了拟人软手框架实时遥操作任务。在本文中米兰平台将从卡内基梅隆大学机器人研究所发布论文《通过交互设计拟人软手的框架》的角度入手,带领大家了解Manus数据手套在灵巧手设计和遥操作中的关键作用。
了解更多06-26 / 2025
-
![协作机器人优化自动化工作流程,提升工作效率]()
协作机器人优化自动化工作流程,提升工作效率
无损检测(NDT)是一种检查方法,用于识别材料中的裂纹或缺陷,或者在不损坏材料的情况下确定材料的元素组成。Olympus拥有多种NDT设备,这些设备具有多种多样的测量功能,允许最终用户对各种行业中使用的金属、塑料、陶瓷和复合材料进行检查、检测缺陷、测量厚度或元素成分。Olympus的NDT设备广泛应用于区域航空枢纽和飞机检测中。飞机暴露在强大的扭矩和作用力下,以及极端的湿度和温度环境中,所有这些都
了解更多06-25 / 2025
-
![动作捕捉技术在人形机器人训练中的优势]()
动作捕捉技术在人形机器人训练中的优势
在人工智能与机器人技术深度融合的背景下,人形机器人的运动能力与交互自然性成为衡量其应用价值的核心指标。动作捕捉技术通过将人类动作转化为数字信号,为机器人提供精准的运动模板,成为破解这一难题的关键技术。其中,荷兰Xsens公司研发的惯性动作捕捉系统凭借其高精度、抗干扰、易部署等特性,在全球人形机器人研发领域占据重要地位。本文将以Xsens产品为例,解析动作捕捉技术在机器人训练中的核心优势。
了解更多06-23 / 2025